TRI Dataset Governance Policy (DGP) Schema¶
DGP-compliant datasets follow the structure and schema defined in this directory. Top-level data containers are listed below:
SceneDataset data structure description¶
SceneDataset: A SceneDataset contains
DatasetMetadataand a collection ofSceneassigned to differentsplitfor training, evaluation and inference.Scene: A Scene consists of consecutive
Sampleextracted at a fixed frequency in a robot session. Normally we extract 10~20 seconds Scenes at 10Hz from raw driving logs.Sample: A sample is a container that encapsulates time-synchronized sensory
Datum(images, point clouds, radar point clouds, etc) and calibrations.Datum: A Datum encapsulates sensory data (image, point cloud, radar point cloud, etc), along with their associated annotations.
AgentDataset data structure description¶
AgentDataset: Dataset for agent-centric prediction or planning use cases,but guaranteeing trajectory of main agent is present in any fetched sample.
AgentSnapshot: An Agent in a Scene can be represented by either an AgentSnapshot2D or AgentSnapshot3D. If it is AgentSnaphot3D, then the agent is represented as a BoundingBox3D along with other fields such as features, instance id’s, etc. In case it is represented as AgentSnapshot2D, then a BoundingBox2D is used.
AgentSlice: Encapsulates all Agents in a Sample.
AgentTrack: The track of a single Agent in the Scene.
AgentGroup: Encapsulates all Agents in a Scene.
Feature: Agent’s requested feature type can include agent_2d, agent_3d, ego_intention, corridor, intersection or parked car.
Ontology: An Ontology represents a set of unique objects such as Vehicle, Truck, Pedestrian, etc.
Feature Ontology: A Feature Ontology represents a set of unique feature fields such as Speed, Parking attribute, etc.
Protobuf Directory Structure¶
All the protobuf schemas are defined under this proto/ directory. Schema
for the following types are specified their corresponding proto files.
Agent: ``agent.proto` <./agent.proto>`_
Annotations and Annotation Types: ``annotations.proto` <./annotations.proto>`_
Dataset Artifacts: ``artifacts.proto` <./artifacts.proto>`_
Dataset Provenance / Tracking: ``identifiers.proto` <./identifiers.proto>`_
Dataset: ``dataset.proto` <./dataset.proto>`_
Features: ``features.proto` <./features.proto>`_
Image container: ``image.proto` <./image.proto>`_
Ontology: ``ontology.proto` <./ontology.proto>`_
PointCloud container: ``point_cloud.proto` <./point_cloud.proto>`_
Radar PointCloud container: ``radar_point_cloud.proto` <./radar_point_cloud.proto>`_
Remote Storage: ``remote.proto` <./remote.proto>`_
SceneDataset schema graph¶
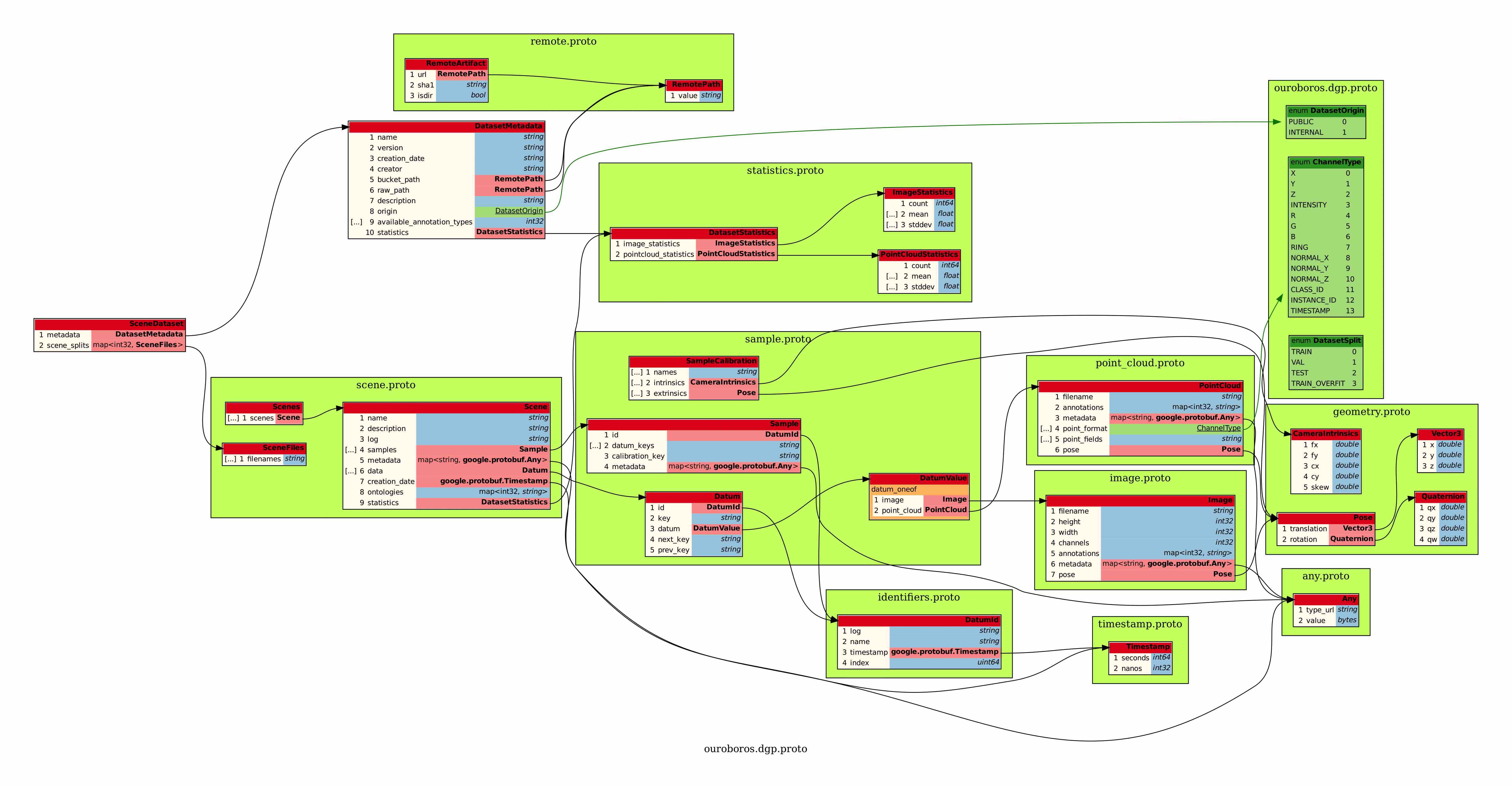
DGP SceneDataset Structure¶
Scenes are stored in the DGP under the following structure:
<dataset_root_dir>
├── <scene_name>
│ ├── point_cloud // datum
│ │ └── <lidar_name>
│ │ ├── <posix_timestamp_us>.npz
│ │ └── ...
│ │ └── ...
│ ├── rgb // datum
│ │ └── <camera_name>
│ │ ├── <posix_timestamp_us>.png
│ │ └── ...
│ │ └── ...
│ ├── bounding_box_2d // annotation
│ │ └── <camera_name>
│ │ ├── <annotation_hash>.json
│ │ └── ...
│ │ └── ...
│ ├── bounding_box_3d // annotation
│ │ └── <lidar_name>
│ │ ├── <annotation_hash>.json
│ │ └── ...
│ │ └── ...
│ ├── calibration // calibration
│ │ └── <calibration_hash>.json
│ │ └── ...
│ ├── ontology // ontology
│ │ └── <ontology_hash>.json
| └── ...
│ └── scene_<scene_hash>.json
├── <scene_name>
└── ...
└── scene_dataset_v<version>.json
DGP AgentDataset Structure¶
Agents are stored in the DGP under the following structure:
📦<dataset_root_dir>
┣ 📂<scene_name>
┃ ┣ 📂agent
┃ ┃ ┣ 📜agent_tracks_<agent_hash>.json
┃ ┃ ┗ 📜agents_slices_<agent_hash>.json
┃ ┣ 📂bounding_box_2d
┃ ┃ ┣ 📂<camera_name>
┃ ┃ ┃ ┣ 📜<annotation_hash>.json
┃ ┃ ┃ ┗ ..
┃ ┃ ┗ ..
┃ ┣ 📂bounding_box_3d
┃ ┃ ┣ 📂<camera_name>
┃ ┃ ┃ ┗ 📜<annotation_hash>.json
┃ ┃ ┃ ┗ ..
┃ ┃ ┗ ..
┃ ┃ ┗ 📂<lidar_name>
┃ ┃ ┃ ┗ 📜<annotation_hash>.json
┃ ┃ ┃ ┗ ..
┃ ┣ 📂calibration
┃ ┃ ┗ 📜<calibration_hash>.json
┃ ┣ 📂feature_ontology
┃ ┃ ┗ 📜<feature_ontology_hash>.json
┃ ┣ 📂ontology
┃ ┃ ┗ 📜<ontology_hash>.json
┃ ┣ 📂point_cloud
┃ ┃ ┗ 📂<lidar_name>
┃ ┃ ┃ ┣ 📜<posix_timestamp_us>.npz
┃ ┃ ┃ ┗ ..
┃ ┣ 📂rgb
┃ ┃ ┣ 📂<camera_name>
┃ ┃ ┃ ┣ 📜<posix_timestamp_us>.jpg
┃ ┃ ┃ ┗ ..
┃ ┃ ┗ ..
┃ ┣ 📜agents_<agent_hash>.json
┃ ┗ 📜scene_<scene_hash>.json
┣ 📜agents_v<version>.json
┗ 📜scene_dataset_v<version>.json
Autolabel Structure¶
Autolabes should be stored within their parent scene directory under
<parent scene dir>/autolabels/<autolabel model> folder. Autolabels may also be
stored outside of the parent scene folder, in this case they must be stored with
the following directory structure:
<autolabel root>/<parent scene dir basename>/autolabels/<autolabel model>.
In both cases <autolabel model> should be unique a string denoting which model
or process generated the autolabels.